引导语
AbstractQueuedSynchronizer 中文翻译叫做同步器,简称 AQS,是各种各样锁的基础,比如说 ReentrantLock、CountDownLatch 等等,这些我们经常用的锁底层实现都是 AQS,所以学好 AQS 对于后面理解锁的实现是非常重要的。
锁章节的内容是这么安排的:
1:AQS 源码非常多,我们会分成两个小节来说,先把底层原理弄清楚;
2:我们平时用不到 AQS,只会接触到 ReentrantLock、CountDownLatch 这些锁,我们以两个锁为例子,讲解下源码,因为 AQS 只要弄懂了,所有的锁你只要清楚锁的目的,就能够利用 AQS 去实现它;
3:总结一下锁的面试题;
4:总结一下锁在工作中有哪些使用场景,举几个实际的例子,看看锁使用时,有哪些注意事项;
5:最后我们自己来实现一个锁,看看如果我们自己来实现锁,有哪些步骤,需要注意哪些事项。
ps:本章内容需要大量队列基础知识,没有看过第四章节队列的同学,建议先阅读下队列章节。
1、整体架构
首先我们来看一下 AQS 的整体架构图,如下:
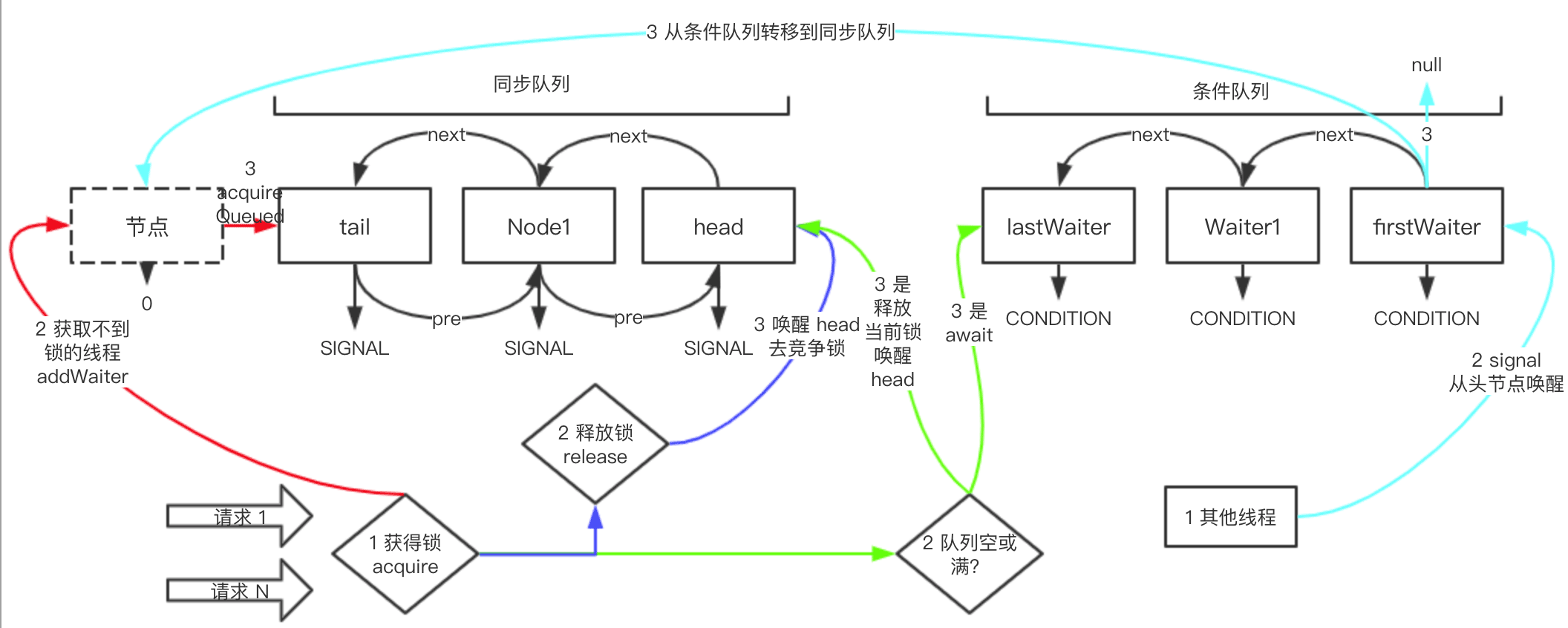
这个图总结了 AQS 整体架构的组成,和部分场景的动态流向,图中两个点说明一下,方便大家观看。
- AQS 中队列只有两个:同步队列 + 条件队列,底层数据结构两者都是链表;
- 图中有四种颜色的线代表四种不同的场景,1、2、3 序号代表看的顺序。
AQS 本身就是一套锁的框架,它定义了获得锁和释放锁的代码结构,所以如果要新建锁,只要继承 AQS,并实现相应方法即可。
接下来我们一起来看下这个图中各个细节点。
1.1、类注释
首先我们来看一下,从 AQS 类注释上,我们可以得到哪些信息:
- 提供了一种框架,自定义了先进先出的同步队列,让获取不到锁的线程能进入同步队列中排队;
- 同步器有个状态字段,我们可以通过状态字段来判断能否得到锁,此时设计的关键在于依赖安全的 atomic value 来表示状态(虽然注释是这个意思,但实际上是通过把状态声明为 volatile,在锁里面修改状态值来保证线程安全的);
- 子类可以通过给状态 CAS 赋值来决定能否拿到锁,可以定义那些状态可以获得锁,哪些状态表示获取不到锁(比如定义状态值是 0 可以获得锁,状态值是 1 就获取不到锁);
- 子类可以新建非 public 的内部类,用内部类来继承 AQS,从而实现锁的功能;
- AQS 提供了排它模式和共享模式两种锁模式。排它模式下:只有一个线程可以获得锁,共享模式可以让多个线程获得锁,子类 ReadWriteLock 实现了两种模式;
- 内部类 ConditionObject 可以被用作 Condition,我们通过 new ConditionObject () 即可得到条件队列;
- AQS 实现了锁、排队、锁队列等框架,至于如何获得锁、释放锁的代码并没有实现,比如 tryAcquire、tryRelease、tryAcquireShared、tryReleaseShared、isHeldExclusively 这些方法,AQS 中默认抛 UnsupportedOperationException 异常,都是需要子类去实现的;
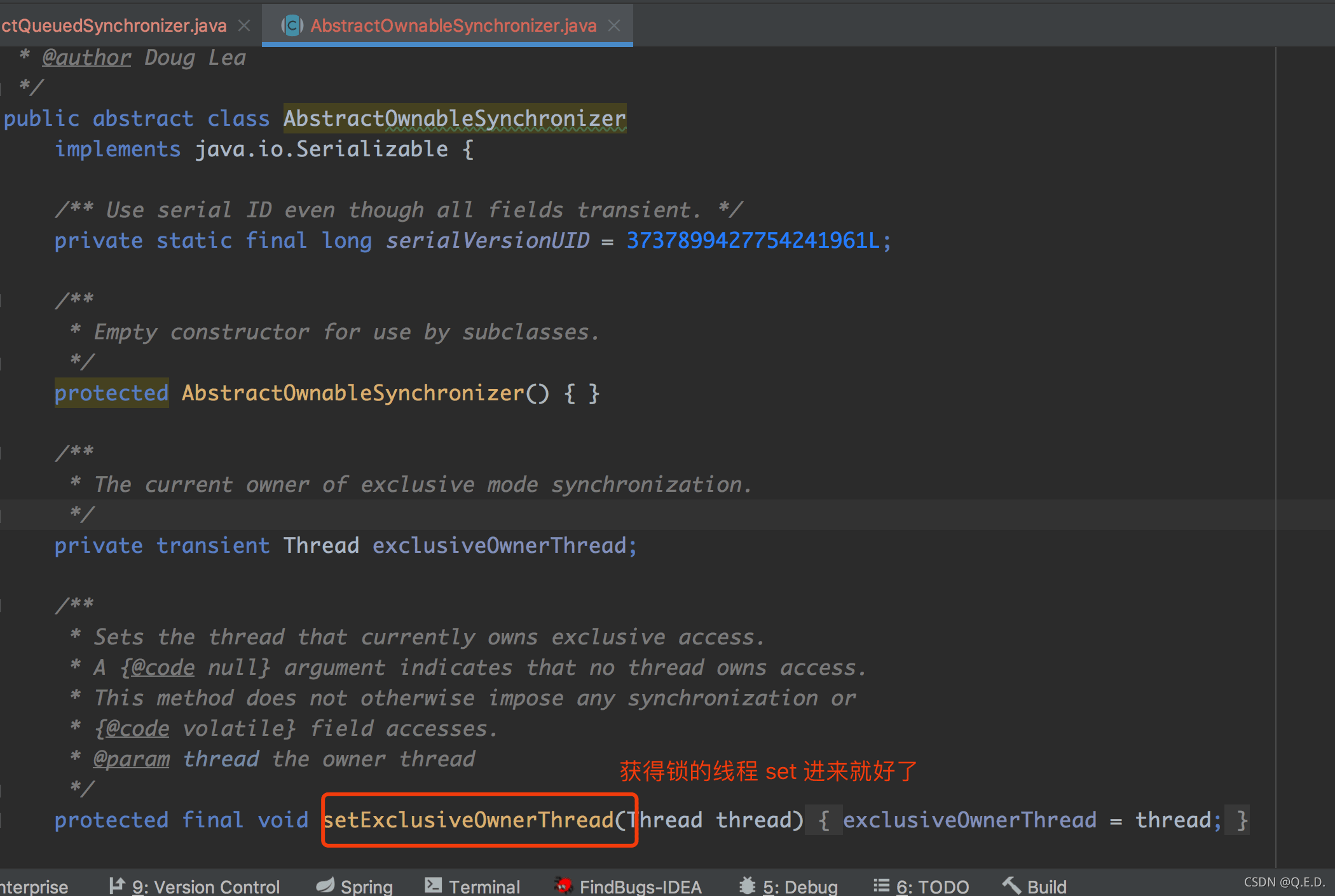
- AQS 继承 AbstractOwnableSynchronizer 是为了方便跟踪获得锁的线程,可以帮助监控和诊断工具识别是哪些线程持有了锁;
- AQS 同步队列和条件队列,获取不到锁的节点在入队时是先进先出,但被唤醒时,可能并不会按照先进先出的顺序执行。
AQS 的注释还有很多很多,以上 9 点是挑选出来稍微比较重要的注释总结。
1.2、类定义
AQS 类定义代码如下:
|
1
2
3
|
public abstract class AbstractQueuedSynchronizer
extends AbstractOwnableSynchronizer
implements java.io.Serializable {
|
可以看出两点:
AQS 是个抽象类,就是给各种锁子类继承用的,AQS 定义了很多如何获得锁,如何释放锁的抽象方法,目的就是为了让子类去实现;
继承了 AbstractOwnableSynchronizer,AbstractOwnableSynchronizer 的作用就是为了知道当前是那个线程获得了锁,方便监控用的,
代码如下:
1.3、基本属性
AQS 的属性可简单分为四类:同步器简单属性、同步队列属性、条件队列属性、公用 Node。
1.3.1、简单属性
首先我们来看一下简单属性有哪些:
|
1
2
3
4
5
6
7
8
|
// 同步器的状态,子类会根据状态字段进行判断是否可以获得锁
// 比如 CAS 成功给 state 赋值 1 算得到锁,赋值失败为得不到锁, CAS 成功给 state 赋值 0 算释放锁,赋值失败为释放失败
// 可重入锁,每次获得锁 +1,每次释放锁 -1
private volatile int state;
// 自旋超时阀值,单位纳秒
// 当设置等待时间时才会用到这个属性
static final long spinForTimeoutThreshold = 1000L;
|
最重要的就是 state 属性,是 int 属性的,所有继承 AQS 的锁都是通过这个字段来判断能不能获得锁,能不能释放锁。
1.3.2 、同步队列属性
首先我们介绍以下同步队列:当多个线程都来请求锁时,某一时刻有且只有一个线程能够获得锁(排它锁),那么剩余获取不到锁的线程,都会到同步队列中去排队并阻塞自己,当有线程主动释放锁时,就会从同步队列头开始释放一个排队的线程,让线程重新去竞争锁。
所以同步队列的主要作用阻塞获取不到锁的线程,并在适当时机释放这些线程。
同步队列底层数据结构是个双向链表,我们从源码中可以看到链表的头尾,如下:
|
1
2
3
4
|
// 同步队列的头。
private transient volatile Node head;
// 同步队列的尾
private transient volatile Node tail;
|
源码中的 Node 是同步队列中的元素,但 Node 被同步队列和条件队列公用,所以我们在说完条件队列之后再说 Node。
1.3.3、条件队列的属性
首先我们介绍下条件队列:条件队列和同步队列的功能一样,管理获取不到锁的线程,底层数据结构也是链表队列,但条件队列不直接和锁打交道,但常常和锁配合使用,是一定的场景下,对锁功能的一种补充。
条件队列的属性如下:
|
1
2
3
4
5
6
7
8
|
// 条件队列,从属性上可以看出是链表结构
public class ConditionObject implements Condition, java.io.Serializable {
private static final long serialVersionUID = 1173984872572414699L;
// 条件队列中第一个 node
private transient Node firstWaiter;
// 条件队列中最后一个 node
private transient Node lastWaiter;
}
|
ConditionObject 我们就称为条件队列,我们需要使用时,直接 new ConditionObject () 即可。
ConditionObject 是实现 Condition 接口的,Condition 接口相当于 Object 的各种监控方法,比如 Object#wait ()、Object#notify、Object#notifyAll 这些方法,我们可以先这么理解,后面会细说。
1.3.4、Node
Node 非常重要,即是同步队列的节点,又是条件队列的节点,在入队的时候,我们用 Node 把线程包装一下,然后把 Node 放入两个队列中,我们看下 Node 的数据结构,如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
|
static final class Node {
/**
* 同步队列单独的属性
*/
//node 是共享模式
static final Node SHARED = new Node();
//node 是排它模式
static final Node EXCLUSIVE = null;
// 当前节点的前节点
// 节点 acquire 成功后就会变成head
// head 节点不能被 cancelled
volatile Node prev;
// 当前节点的下一个节点
volatile Node next;
/**
* 两个队列共享的属性
*/
// 表示当前节点的状态,通过节点的状态来控制节点的行为
// 普通同步节点,就是 0 ,条件节点是 CONDITION -2
volatile int waitStatus;
// waitStatus 的状态有以下几种
// 被取消
static final int CANCELLED = 1;
// SIGNAL 状态的意义:同步队列中的节点在自旋获取锁的时候,如果前一个节点的状态是 SIGNAL,那么自己就可以阻塞休息了,否则自己一直自旋尝试获得锁
static final int SIGNAL = -1;
// 表示当前 node 正在条件队列中,当有节点从同步队列转移到条件队列时,状态就会被更改成 CONDITION
static final int CONDITION = -2;
// 无条件传播,共享模式下,该状态的进程处于可运行状态
static final int PROPAGATE = -3;
// 当前节点的线程
volatile Thread thread;
// 在同步队列中,nextWaiter 并不真的是指向其下一个节点,我们用 next 表示同步队列的下一个节点,nextWaiter 只是表示当前 Node 是排它模式还是共享模式
// 但在条件队列中,nextWaiter 就是表示下一个节点元素
Node nextWaiter;
}
|
从 Node 的结构中,我们需要重点关注 waitStatus 字段,Node 的很多操作都是围绕着 waitStatus 字段进行的。
Node 的 pre、next 属性是同步队列中的链表前后指向字段,nextWaiter 是条件队列中下一个节点的指向字段,但在同步队列中,nextWaiter 只是一个标识符,表示当前节点是共享还是排它模式。
1.3.5、共享锁和排它锁的区别
排它锁的意思是同一时刻,只能有一个线程可以获得锁,也只能有一个线程可以释放锁。
共享锁可以允许多个线程获得同一个锁,并且可以设置获取锁的线程数量。
1.4、Condition
刚才我们看条件队列 ConditionObject 时,发现其是实现 Condition 接口的,现在我们一起来看下 Condition 接口,其类注释上是这么写的:
- 当 lock 代替 synchronized 来加锁时,Condition 就可以用来代替 Object 中相应的监控方法了,比如 Object#wait ()、Object#notify、Object#notifyAll 这些方法;
- 提供了一种线程协作方式:一个线程被暂停执行,直到被其它线程唤醒;
- Condition 实例是绑定在锁上的,通过 Lock#newCondition 方法可以产生该实例;
- 除了特殊说明外,任意空值作为方法的入参,都会抛出空指针;
- Condition 提供了明确的语义和行为,这点和 Object 监控方法不同。
类注释上甚至还给我们举了一个例子:
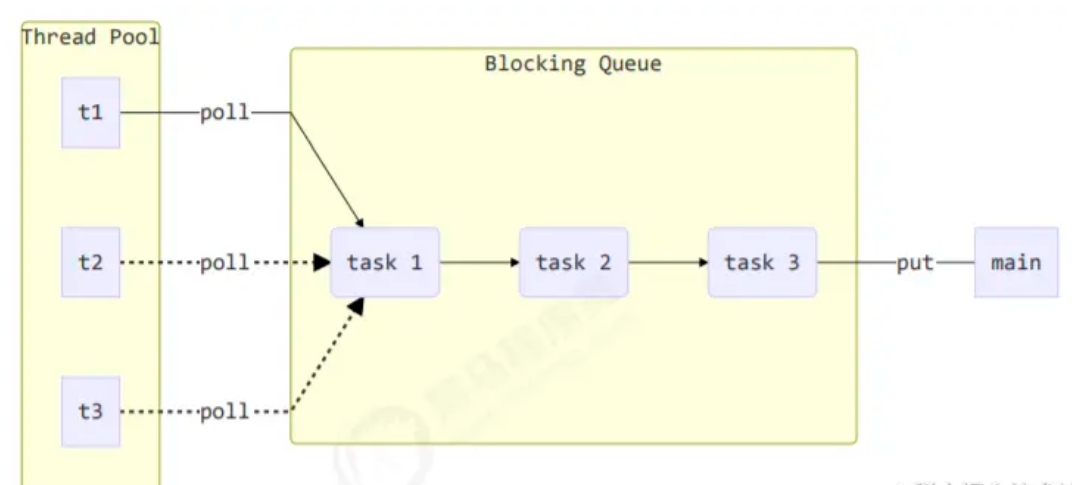
假设我们有一个有界边界的队列,支持 put 和 take 方法,需要满足:
1:如果试图往空队列上执行 take,线程将会阻塞,直到队列中有可用的元素为止;
2:如果试图往满的队列上执行 put,线程将会阻塞,直到队列中有空闲的位置为止。
1、2 中线程阻塞都会到条件队列中去阻塞。
take 和 put 两种操作如果依靠一个条件队列,那么每次只能执行一种操作,所以我们可以新建两个条件队列,这样就可以分别执行操作了,看了这个需求,是不是觉得很像我们第三章学习的队列?实际上注释上给的 demo 就是我们学习过的队列,篇幅有限,感兴趣的可以看看 ConditionDemo 这个测试类。
除了类注释,Condition 还定义出一些方法,这些方法奠定了条件队列的基础,方法主要有:
|
1
|
void await() throws InterruptedException;
|
这个方法的主要作用是:使当前线程一直等待,直到被 signalled 或被打断。
当以下四种情况发生时,条件队列中的线程将被唤醒
- 有线程使用了 signal 方法,正好唤醒了条件队列中的当前线程;
- 有线程使用了 signalAll 方法;
- 其它线程打断了当前线程,并且当前线程支持被打断;
- 被虚假唤醒 (即使没有满足以上 3 个条件,wait 也是可能被偶尔唤醒,虚假唤醒定义可以参考: https://en.wikipedia.org/wiki/Spurious_wakeup)。
被唤醒时,有一点需要注意的是:线程从条件队列中苏醒时,必须重新获得锁,才能真正被唤醒,这个我们在说源码的时候,也会强调这个。
await 方法还有带等待超时时间的,如下:
|
1
2
3
4
5
|
// 返回的 long 值表示剩余的给定等待时间,如果返回的时间小于等于 0 ,说明等待时间过了
// 选择纳秒是为了避免计算剩余等待时间时的截断误差
long awaitNanos(long nanosTimeout) throws InterruptedException;
// 虽然入参可以是任意单位的时间,但底层仍然转化成纳秒
boolean await(long time, TimeUnit unit) throws InterruptedException;
|
除了等待方法,还是唤醒线程的两个方法,如下:
|
1
2
3
4
|
// 唤醒条件队列中的一个线程,在被唤醒前必须先获得锁
void signal();
// 唤醒条件队列中的所有线程
void signalAll();
|
至此,AQS 基本的属性就已经介绍完了,接着让我们来看一看 AQS 的重要方法。
2、同步器的状态
在同步器中,我们有两个状态,一个叫做 state,一个叫做 waitStatus,两者是完全不同的概念:
state 是锁的状态,是 int 类型,子类继承 AQS 时,都是要根据 state 字段来判断有无得到锁,比如当前同步器状态是 0,表示可以获得锁,当前同步器状态是 1,表示锁已经被其他线程持有,当前线程无法获得锁;
waitStatus 是节点(Node)的状态,种类很多,一共有初始化 (0)、CANCELLED (1)、SIGNAL (-1)、CONDITION (-2)、PROPAGATE (-3),各个状态的含义可以见上文。
这两个状态我们需要牢记,不要混淆了。
3、获取锁
获取锁最直观的感受就是使用 Lock.lock () 方法来获得锁,最终目的是想让线程获得对资源的访问权。
Lock 一般是 AQS 的子类,lock 方法根据情况一般会选择调用 AQS 的 acquire 或 tryAcquire 方法。
acquire 方法 AQS 已经实现了,tryAcquire 方法是等待子类去实现,acquire 方法制定了获取锁的框架,先尝试使用 tryAcquire 方法获取锁,获取不到时,再入同步队列中等待锁。tryAcquire 方法 AQS 中直接抛出一个异常,表明需要子类去实现,子类可以根据同步器的 state 状态来决定是否能够获得锁,接下来我们详细看下 acquire 的源码解析。
acquire 也分两种,一种是排它锁,一种是共享锁,我们一一来看下:
3.1、acquire 排它锁
|
1
2
3
4
5
6
7
8
|
// 排它模式下,尝试获得锁
public final void acquire(int arg) {
// tryAcquire 方法是需要实现类去实现的,实现思路一般都是 cas 给 state 赋值来决定是否能获得锁
if (!tryAcquire(arg) &&
// addWaiter 入参代表是排他模式
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
|
以上代码的主要步骤是(流程见整体架构图中红色场景):
尝试执行一次 tryAcquire,如果成功直接返回,失败走 2;线程尝试进入同步队列,首先调用 addWaiter 方法,把当前线程放到同步队列的队尾;接着调用 acquireQueued 方法,两个作用,1:阻塞当前节点,2:节点被唤醒时,使其能够获得锁;如果 2、3 失败了,打断线程。
3.1.1、addWaiter
代码很少,每个方法都是关键,接下来我们先来看下 addWaiter 的源码实现:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
// 方法主要目的:node 追加到同步队列的队尾
// 入参 mode 表示 Node 的模式(排它模式还是共享模式)
// 出参是新增的 node
// 主要思路:
// 新 node.pre = 队尾
// 队尾.next = 新 node
private Node addWaiter(Node mode) {
// 初始化 Node
Node node = new Node(Thread.currentThread(), mode);
// 这里的逻辑和 enq 一致,enq 的逻辑仅仅多了队尾是空,初始化的逻辑
// 这个思路在 java 源码中很常见,先简单的尝试放一下,成功立马返回,如果不行,再 while 循环
// 很多时候,这种算法可以帮忙解决大部分的问题,大部分的入队可能一次都能成功,无需自旋
Node pred = tail;
if (pred != null) {
node.prev = pred;
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
//自旋保证node加入到队尾
enq(node);
return node;
}
// 线程加入同步队列中方法,追加到队尾
// 这里需要重点注意的是,返回值是添加 node 的前一个节点
private Node enq(final Node node) {
for (;;) {
// 得到队尾节点
Node t = tail;
// 如果队尾为空,说明当前同步队列都没有初始化,进行初始化
// tail = head = new Node();
if (t == null) {
if (compareAndSetHead(new Node()))
tail = head;
// 队尾不为空,将当前节点追加到队尾
} else {
node.prev = t;
// node 追加到队尾
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
|
如果之前学习过队列的同学,对这个方法应该感觉毫不吃力,就是把新的节点追加到同步队列的队尾。
其中有一点值得我们学习的地方,是在 addWaiter 方法中,并没有进入方法后立马就自旋,而是先尝试一次追加到队尾,如果失败才自旋,因为大部分操作可能一次就会成功,这种思路在我们写自旋的时候可以借鉴。
3.1.2、acquireQueued
下一步就是要阻塞当前线程了,是 acquireQueued 方法来实现的,我们来看下源码实现:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
|
// 主要做两件事情:
// 1:通过不断的自旋尝试使自己前一个节点的状态变成 signal,然后阻塞自己。
// 2:获得锁的线程执行完成之后,释放锁时,会把阻塞的 node 唤醒,node 唤醒之后再次自旋,尝试获得锁
// 返回 false 表示获得锁成功,返回 true 表示失败
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
// 自旋
for (;;) {
// 选上一个节点
final Node p = node.predecessor();
// 有两种情况会走到 p == head:
// 1:node 之前没有获得锁,进入 acquireQueued 方法时,才发现他的前置节点就是头节点,于是尝试获得一次锁;
// 2:node 之前一直在阻塞沉睡,然后被唤醒,此时唤醒 node 的节点正是其前一个节点,也能走到 if
// 如果自己 tryAcquire 成功,就立马把自己设置成 head,把上一个节点移除
// 如果 tryAcquire 失败,尝试进入同步队列
if (p == head && tryAcquire(arg)) {
// 获得锁,设置成 head 节点
setHead(node);
//p被回收
p.next = null; // help GC
failed = false;
return interrupted;
}
// shouldParkAfterFailedAcquire 把 node 的前一个节点状态置为 SIGNAL
// 只要前一个节点状态是 SIGNAL了,那么自己就可以阻塞(park)了
// parkAndCheckInterrupt 阻塞当前线程
if (shouldParkAfterFailedAcquire(p, node) &&
// 线程是在这个方法里面阻塞的,醒来的时候仍然在无限 for 循环里面,就能再次自旋尝试获得锁
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
// 如果获得node的锁失败,将 node 从队列中移除
if (failed)
cancelAcquire(node);
}
}
|
此方法的注释还是很清楚的,我们接着看下此方法的核心:shouldParkAfterFailedAcquire,这个方法的主要目的就是把前一个节点的状态置为 SIGNAL,只要前一个节点的状态是 SIGNAL,当前节点就可以阻塞了(parkAndCheckInterrupt 就是使节点阻塞的方法),
源码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
// 当前线程可以安心阻塞的标准,就是前一个节点线程状态是 SIGNAL 了。
// 入参 pred 是前一个节点,node 是当前节点。
// 关键操作:
// 1:确认前一个节点是否有效,无效的话,一直往前找到状态不是取消的节点。
// 2: 把前一个节点状态置为 SIGNAL。
// 1、2 两步操作,有可能一次就成功,有可能需要外部循环多次才能成功(外面是个无限的 for 循环),但最后一定是可以成功的
private static boolean shouldParkAfterFailedAcquire(Node pred, Node node) {
int ws = pred.waitStatus;
// 如果前一个节点 waitStatus 状态已经是 SIGNAL 了,直接返回,不需要在自旋了
if (ws == Node.SIGNAL)
/*
* This node has already set status asking a release
* to signal it, so it can safely park.
*/
return true;
// 如果当前节点状态已经被取消了。
if (ws > 0) {
/*
* Predecessor was cancelled. Skip over predecessors and
* indicate retry.
*/
// 找到前一个状态不是取消的节点,因为把当前 node 挂在有效节点身上
// 因为节点状态是取消的话,是无效的,是不能作为 node 的前置节点的,所以必须找到 node 的有效节点才行
do {
node.prev = pred = pred.prev;
} while (pred.waitStatus > 0);
pred.next = node;
// 否则直接把节点状态置 为SIGNAL
} else {
/*
* waitStatus must be 0 or PROPAGATE. Indicate that we
* need a signal, but don't park yet. Caller will need to
* retry to make sure it cannot acquire before parking.
*/
compareAndSetWaitStatus(pred, ws, Node.SIGNAL);
}
return false;
}
|
acquire 整个过程非常长,代码也非常多,但注释很清楚,可以一行一行仔细看看代码。
总结一下,acquire 方法大致分为三步:
- 使用 tryAcquire 方法尝试获得锁,获得锁直接返回,获取不到锁的走 2;
- 把当前线程组装成节点(Node),追加到同步队列的尾部(addWaiter);
- 自旋,使同步队列中当前节点的前置节点状态为 signal 后,然后阻塞自己。
整体的代码结构比较清晰,一些需要注意的点,都用注释表明了,强烈建议阅读下源码。
3.2、acquireShared 获取共享锁
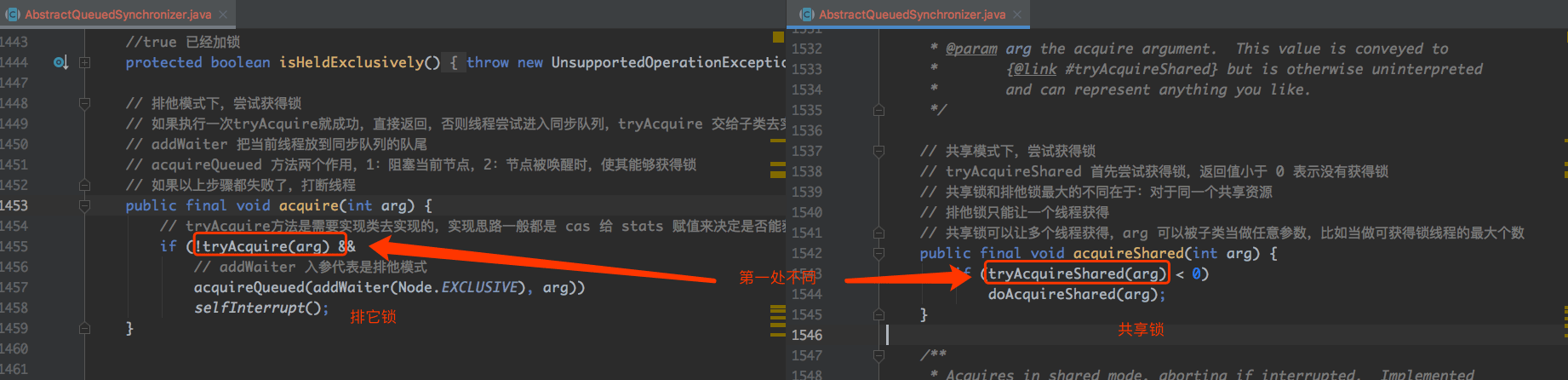
acquireShared 整体流程和 acquire 相同,代码也很相似,重复的源码就不贴了,我们就贴出来不一样的代码来,也方便大家进行比较:
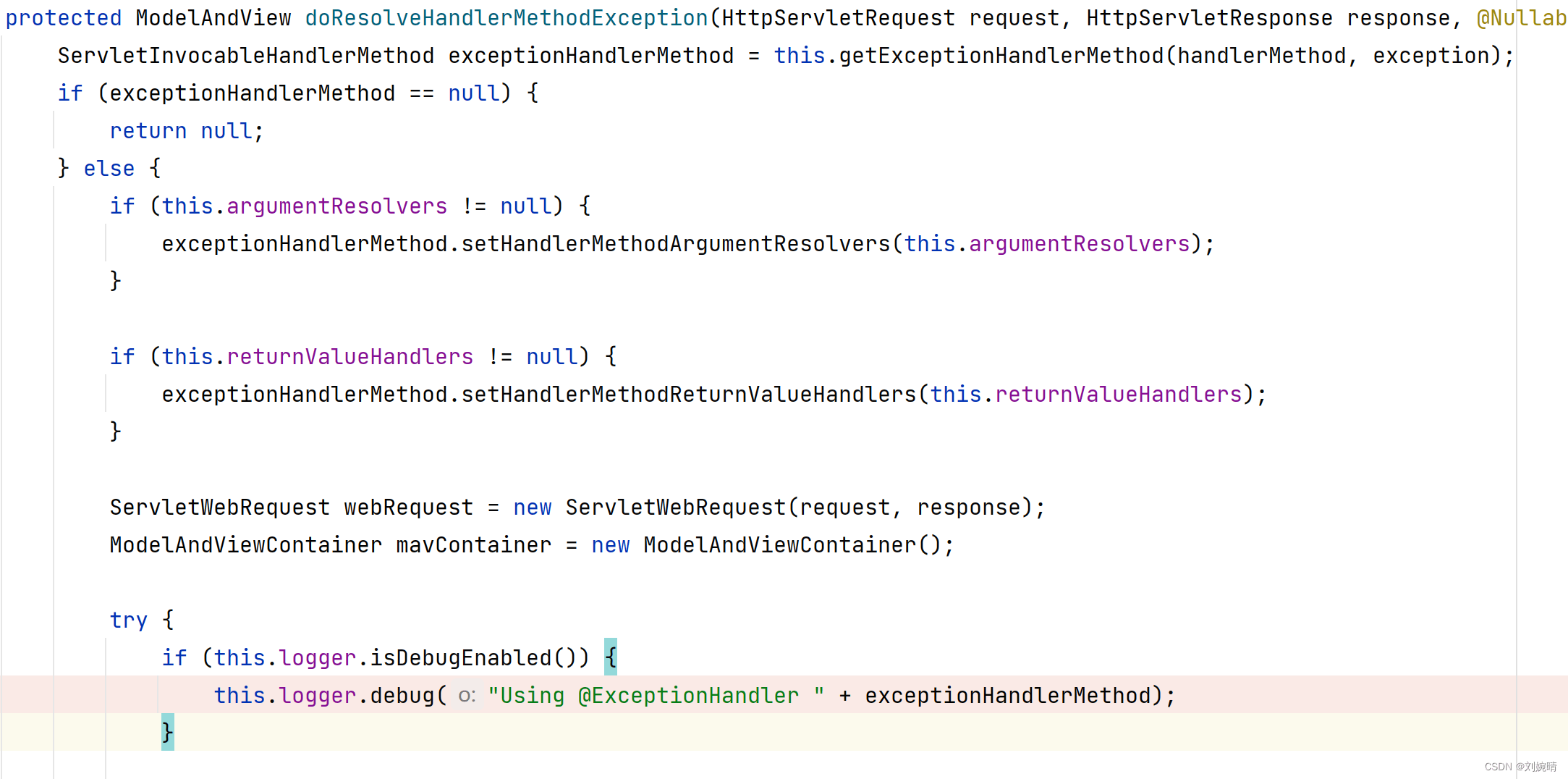
第一步尝试获得锁的地方,有所不同,排它锁使用的是 tryAcquire 方法,共享锁使用的是 tryAcquireShared 方法,如下图:
第二步不同,在于节点获得排它锁时,仅仅把自己设置为同步队列的头节点即可(setHead 方法),但如果是共享锁的话,还会去唤醒自己的后续节点,一起来获得该锁(setHeadAndPropagate 方法),不同之处如下(左边排它锁,右边共享锁):
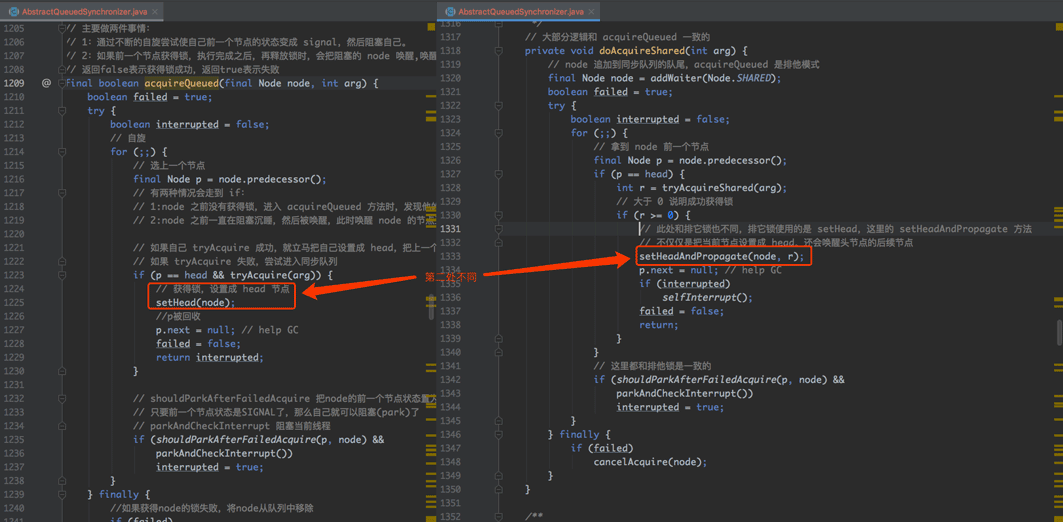
接下来我们一起来看下 setHeadAndPropagate 方法的源码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
|
// 主要做两件事情
// 1:把当前节点设置成头节点
// 2:看看后续节点有无正在等待,并且也是共享模式的,有的话唤醒这些节点
private void setHeadAndPropagate(Node node, int propagate) {
Node h = head; // Record old head for check below
// 当前节点设置成头节点
setHead(node);
/*
* Try to signal next queued node if:
* Propagation was indicated(表示指示) by caller,
* or was recorded (as h.waitStatus either before
* or after setHead) by a previous operation
* (note: this uses sign-check of waitStatus because
* PROPAGATE status may transition to SIGNAL.)
* and
* The next node is waiting in shared mode,
* or we don't know, because it appears null
*
* The conservatism(保守) in both of these checks may cause
* unnecessary wake-ups, but only when there are multiple
* racing acquires/releases, so most need signals now or soon
* anyway.
*/
// propagate > 0 表示已经有节点获得共享锁了
if (propagate > 0 || h == null || h.waitStatus < 0 ||
(h = head) == null || h.waitStatus < 0) {
Node s = node.next;
//共享模式,还唤醒头节点的后置节点
if (s == null || s.isShared())
doReleaseShared();
}
}
// 释放后置共享节点
private void doReleaseShared() {
/*
* Ensure that a release propagates, even if there are other
* in-progress acquires/releases. This proceeds in the usual
* way of trying to unparkSuccessor of head if it needs
* signal. But if it does not, status is set to PROPAGATE to
* ensure that upon release, propagation continues.
* Additionally, we must loop in case a new node is added
* while we are doing this. Also, unlike other uses of
* unparkSuccessor, we need to know if CAS to reset status
* fails, if so rechecking.
*/
for (;;) {
Node h = head;
// 还没有到队尾,此时队列中至少有两个节点
if (h != null && h != tail) {
int ws = h.waitStatus;
// 如果队列状态是 SIGNAL ,说明后续节点都需要唤醒
if (ws == Node.SIGNAL) {
// CAS 保证只有一个节点可以运行唤醒的操作
if (!compareAndSetWaitStatus(h, Node.SIGNAL, 0))
continue; // loop to recheck cases
// 进行唤醒操作
unparkSuccessor(h);
}
else if (ws == 0 &&
!compareAndSetWaitStatus(h, 0, Node.PROPAGATE))
continue; // loop on failed CAS
}
// 第一种情况,头节点没有发生移动,结束。
// 第二种情况,因为此方法可以被两处调用,一次是获得锁的地方,一处是释放锁的地方,
// 加上共享锁的特性就是可以多个线程获得锁,也可以释放锁,这就导致头节点可能会发生变化,
// 如果头节点发生了变化,就继续循环,一直循环到头节点不变化时,结束循环。
if (h == head) // loop if head changed
break;
}
}
|
这个就是共享锁独特的地方,当一个线程获得锁后,它就会去唤醒排在它后面的其它节点,让其它节点也能够获得锁。
4、总结
AQS 的内容实在太多了,这只是 AQS 的上篇,但内容长度已经超过了我们平时章节的三倍了,所以不得不分节,下一章仍然是 AQS,主要讲解锁的释放和条件队列两大部分。