对于ROS小车底盘地图数据需要知道的点 1.整幅地图处于第三象限 2.坐标值代表距离,单位米。 3.分辨率单位(米/像素) 因此通过地图坐标得到像素坐标的办法: 像素坐标=(实时坐标-初
|
对于ROS小车底盘地图数据需要知道的点
2.坐标值代表距离,单位米。
返回的json数据中
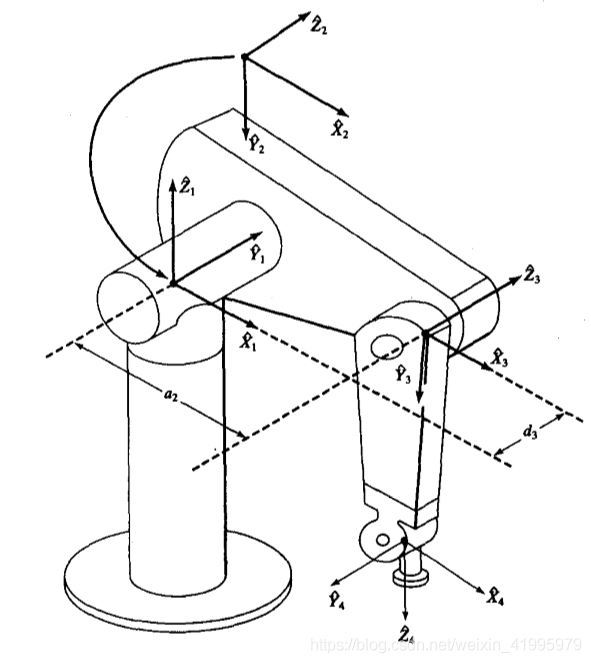
下面接着给大家介绍下ROS中的坐标系定义ROS最常用到的三个坐标系是:map、odom、base_link。 base_link描述的就是机器人当前时刻的位姿,是移动的坐标系。 odom是机器人运动的参考坐标系,是固定不动的(world fixed frame)。坐标系原点设为机器人的运动起始点,那么机器人的位姿是相对于odom来描述的。 map是世界坐标系,是固定不动的(world fixed frame)。可以在机器人所在的环境中随意指定一个点作为世界坐标系原点,规定其具体的朝向,那么分布在不同地方的所有的机器人和其他设备(包括激光雷达、相机等等)的坐标都可以统一到这个坐标系下。map可以和odom重合,也可以不重合,取决于实际需要。通过map和odom之间的变换,可以得到机器人相对于世界坐标系的位姿。 REP105提到:
这里指的应该是SLAM中的回环检测在发现回环后,通过非线性优化消除视觉里程计的累积误差时,可能会顺带着把机器人的起始位姿给优化了,比如机器人在世界坐标系中的初始坐标是(1,2,3),优化后变成(1.1,2.2,3.3),而机器人起始位姿和世界坐标系之间的关系是固定的,那么世界坐标系也会随着跳到一个新的位置,这就是文中说到的“discrete jumps”。这有两个解决方案: 优化时保持第一个位姿固定优化所有位姿,但是要对优化后的所有位姿做一个变换,使得第一个位姿恢复原样。 注意在odom下表达的位姿没有上述问题,因为不管怎么优化,总是设置机器人起始位置在odom坐标系下就是(0,0,0),后面的位姿也都是相对于这个来计算,因此odom坐标系本身不会跳变。 REP(ROS Enhancement Proposal)第103条款推荐坐标系的x轴指向前方,y轴指向左方,z轴指向上方。这和相机坐标系有所区别,通常是x轴指向右方,y轴指向下方,z轴指向前方 |





2022-04-23
2022-10-16
2022-08-26
2020-04-20
2021-01-20