什么是并发安全? 在高并发场景下,进程、线程(协程)可能会发生资源竞争,导致数据脏读、脏写、死锁等问题,为了避免此类问题的发生,就有了并发安全。 这里举一个简单的例
什么是并发安全?在高并发场景下,进程、线程(协程)可能会发生资源竞争,导致数据脏读、脏写、死锁等问题,为了避免此类问题的发生,就有了并发安全。 这里举一个简单的例子:
在这段代码中 第2行go关键字开启了一个新的协程,来执行data++操作 第5行,对data变量进行了读取判断的操作 以上两部是由2个不同线程/协程运行,且没有任何措施保证执行顺序,所以执行结果是不确定的。
Go如何保证并发安全 目前了解到的,大概有这3种,Mutex、Channel、Atomic Mutex加锁应该是最常见的并发控制方法,一般分成两种,乐观锁和悲观锁。 锁是由操作系统的调度器来实现的,锁通常用来保护一段逻辑, 悲观锁悲观锁是一种悲观思想,它总认为最坏的情况可能会出现。不管意料之外的结果是否会发生,只要存在发生的可能,就在操作这个资源之前先上锁。例如互斥锁、读写锁都是悲观锁。 在go中,除了automic,其它都是悲观锁 悲观锁应该都是由操作系统的调度器来实现的,通常用来保护一段逻辑,主要是通过阻塞其它线程,保证当前时刻只有一个线程在对资源进行操作,因此性能相对较差,浪费了计算机多核的优势。 乐观锁乐观锁的思想与悲观锁的思想相反,它总认为资源和数据不会被别人所修改,所以读取不会上锁,但是乐观锁在进行写入操作的时候会判断当前数据是否被修改过。 乐观锁的实现方案主要包含CAS和版本号机制。 乐观锁适用于多读的场景,可以提高吞吐量。 版本号机制通过在数据表中,增加一个版本号字段,当数据发生更新时,版本号值发生改变。 例如一个线程A想要更新变量s的值,在读取s的值的同时读取版本号,在提交更新时,用之前读到的版本号值与当前的版本号值进行比对,当且仅当版本号值一致时,才会触发更新,否则不断进行重试,直到更新成功。 CASCAS全名为Compare And Swap,即比较与转换,是一种有名的无锁算法。在不使用锁的情况下,实现多线程之间的变量同步,也就是在没有线程被阻塞的情况下实现变量的同步,所以也叫非阻塞同步, 互斥锁GO使用Sync包的Mutex类型来实现互斥锁,它能保证同时只有一个goroutine可以访问资源。
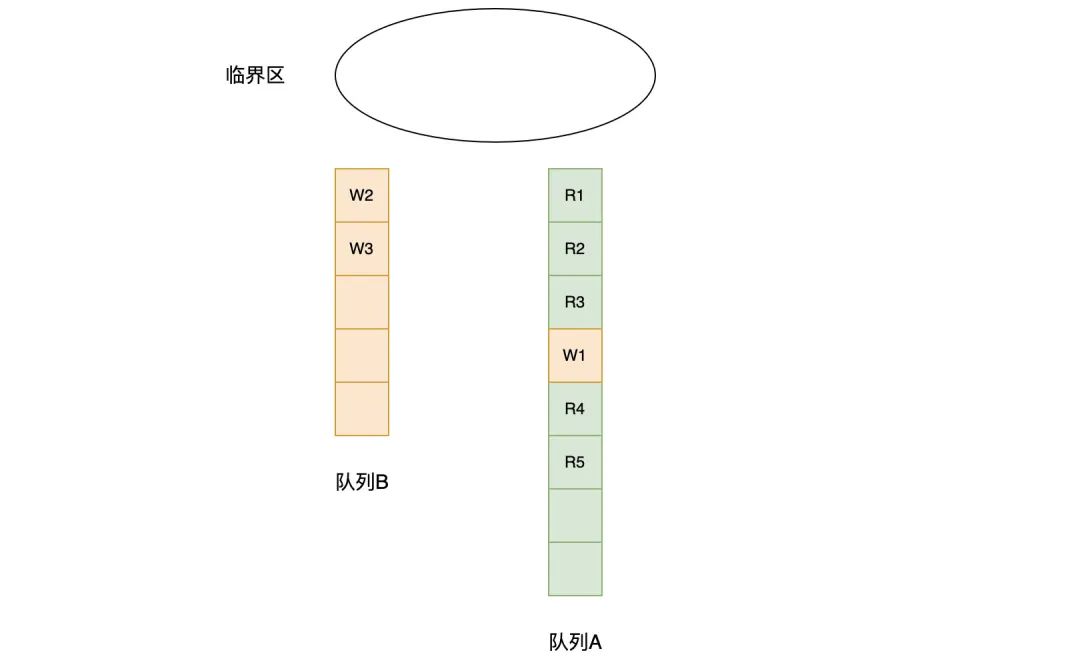
读写互斥锁GO使用Sync包的RWMutex类型来实现互斥锁。当我们去并发的读取一个资源,只要数据没有发生写入,是没必要加锁的。因此读多写少的情况下,使用读写互斥锁是更好的选择,性能更好。 读写锁分为两种:读锁和写锁。 当一个goroutine获取读锁之后,其他的goroutine如果是获取读锁可以顺利获得,如果是获取写锁就会等待; 当一个goroutine获取写锁之后,其他的goroutine无论是获取读锁还是写锁都会等待。
|




2022-04-28
2022-04-21
2022-05-13
2022-08-17
2022-02-25