
使用Python编写测试脚本

1. 工具库简介 1.1 python-can 定位:通用的 CAN 总线通信库,支持多种硬件接口(SocketCAN、PCAN、Kvaser 等)。 核心功能: 连接物理 CAN 设备或虚拟接口。 发送/接收 CAN 报文(标准帧、扩展帧)。
1. 工具库简介1.1 python-can 定位:通用的 CAN 总线通信库,支持多种硬件接口(SocketCAN、PCAN、Kvaser 等)。 核心功能: 连接物理 CAN 设备或虚拟接口。 发送/接收 CAN 报文(标准帧、扩展帧)。 支持 CAN FD(灵活数据速率)。 适用场景:快速搭建 CAN 通信原型,兼容性强。 1.2 canard(CAN 协议栈)定位:专注于 UDS(ISO 14229) 和 J1939 等高层协议解析的库。 核心功能: 解析 DBC 文件,自动化生成信号值。 支持 UDS 诊断服务(如 0x22 读数据、0x2E 写数据)。 处理多帧传输(如 ISO-TP 协议)。 适用场景:需要与 ECU 进行诊断交互的自动化测试。 2. 环境准备2.1 安装库
2.2 硬件准备物理设备:PCAN-USB、Kvaser、Vector 设备(需安装对应驱动)。 虚拟测试:使用 socketcan(Linux 虚拟 CAN 接口)或 CANoe 模拟总线。 3. 核心功能实现示例3.1 使用 python-can 收发 CAN 报文
3.2 使用 canard 解析 DBC 文件
3.3 实现 UDS 诊断服务(基于 canard)
4. 自动化测试脚本设计4.1 测试场景示例:车门状态验证
4.2 集成测试框架(如 pytest)
5. 高级应用技巧5.1 CAN FD 支持
5.2 与 HIL 系统集成
5.3 自动化测试报告生成
6. 常见问题与调试6.1 硬件连接失败现象:CanError: Error sending message 解决: 检查设备驱动是否安装(如 PCAN 需安装 PCAN-Basic API)。 确认通道权限(Linux 需 sudo ip link set vcan0 up)。 6.2 DBC 解析错误现象:KeyError: 'Unknown frame ID' 解决:确保 DBC 文件中包含目标 CAN ID 的定义。 6.3 多帧传输处理
|
您可能感兴趣的文章 :

-
基于Python实现多语言朗读与单词选择测验
在数字化教育日益普及的今天,开发一款能够支持多语言朗读和单词选择测验的程序,对于语言学习者来说无疑是一个巨大的福音。这样的 -
使用Python编写测试脚本
1. 工具库简介 1.1 python-can 定位:通用的 CAN 总线通信库,支持多种硬件接口(SocketCAN、PCAN、Kvaser 等)。 核心功能: 连接物理 CAN 设备或虚 -
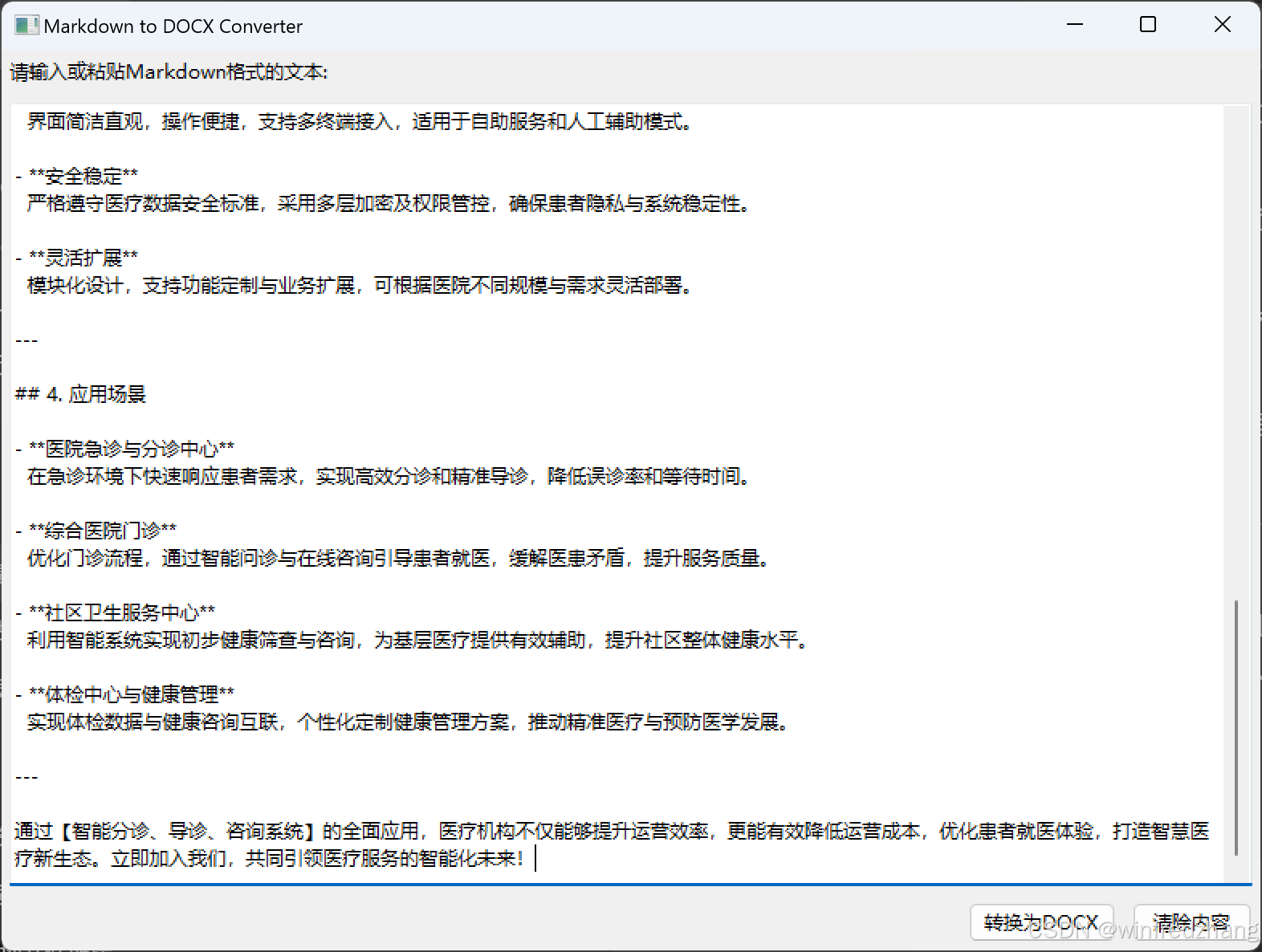
使用Python构建Markdown转Word文档转换器
在当今的文档处理中,Markdown因其简洁的语法和易读性而广受欢迎,而Microsoft Word(DOCX格式)则因其广泛的兼容性和专业的排版效果成为商业 -
Python实现批量添加视频文本水印
这个是一个基于PyQt5开发的视频水印批量添加工具,旨在为多个视频文件添加文本水印。用户可以自定义水印的文本内容、字体颜色、字号大 -
在不同系统间迁移Python程序的方法
在开发 Python 项目时,我们常常会遇到需要将在 Windows 系统上编写的程序迁移到 Linux 服务器上运行的情况,尤其是当服务器环境存在差异( -
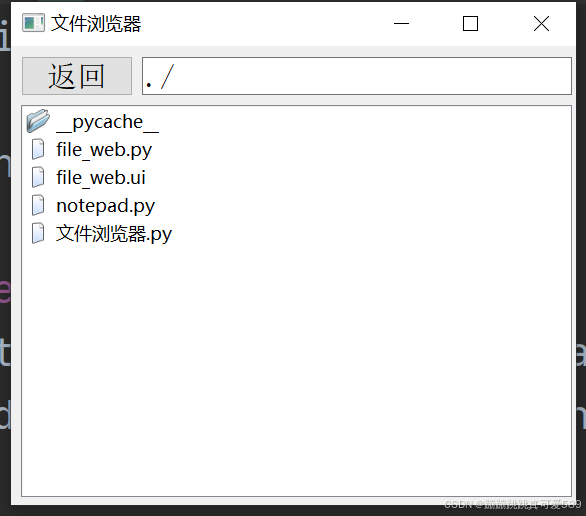
Python+PyQt手搓一个文件浏览器
一、效果展示 二、界面设计 该界面通过Qt Designer设计 ? 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 -
Python实现将PDF文件拆分任意页数介绍
PyMuPDF,简称fitz,是一个轻量级的Python库,它基于MuPDF的C++库,提供了丰富的功能,包括但不限于PDF的读取、编辑、转换和渲染。Fitz作为Py -
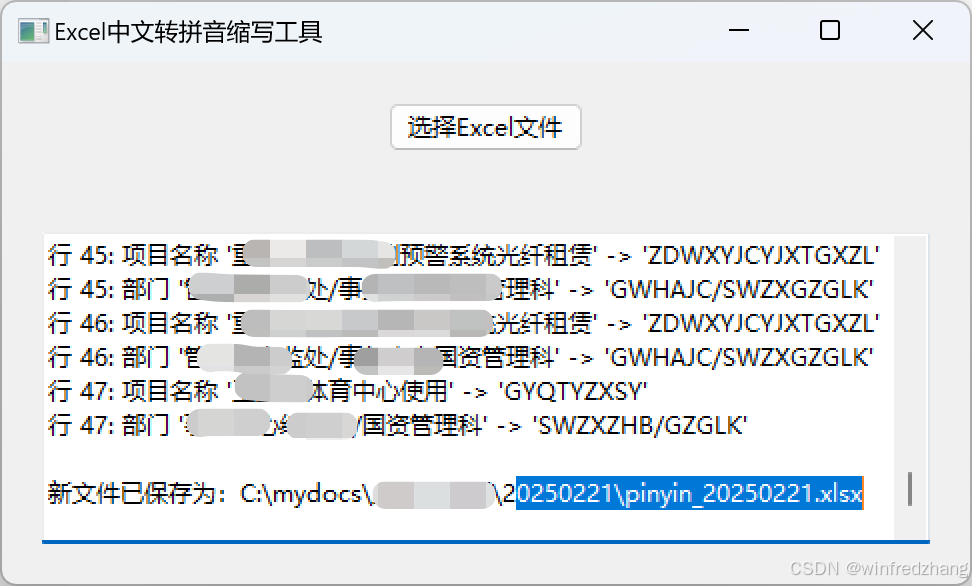
20个实用的Python Excel自动化脚本介绍
在数据处理和分析的过程中,Excel文件是我们日常工作中常见的格式。通过Python,我们可以实现对Excel文件的各种自动化操作,提高工作效率



-
python批量下载抖音视频
2019-06-18
-
利用Pyecharts可视化微信好友的方法
2019-07-04
-
python爬取豆瓣电影TOP250数据
2021-05-23
-
基于tensorflow权重文件的解读
2021-05-27
-
解决Python字典查找报Keyerror的问题
2021-05-27

