'''GoogLeNet with PyTorch.'''
import torch
import torch.nn as nn
import torch.nn.functional as F
# 编写卷积+bn+relu模块
class BasicConv2d(nn.Module):
def __init__(self, in_channels, out_channals, **kwargs):
super(BasicConv2d, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channals, **kwargs)
self.bn = nn.BatchNorm2d(out_channals)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
return F.relu(x)
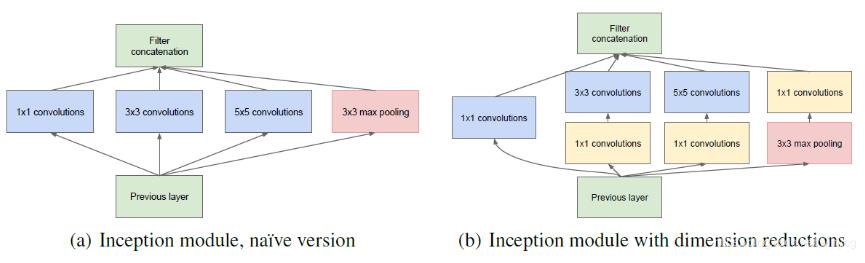
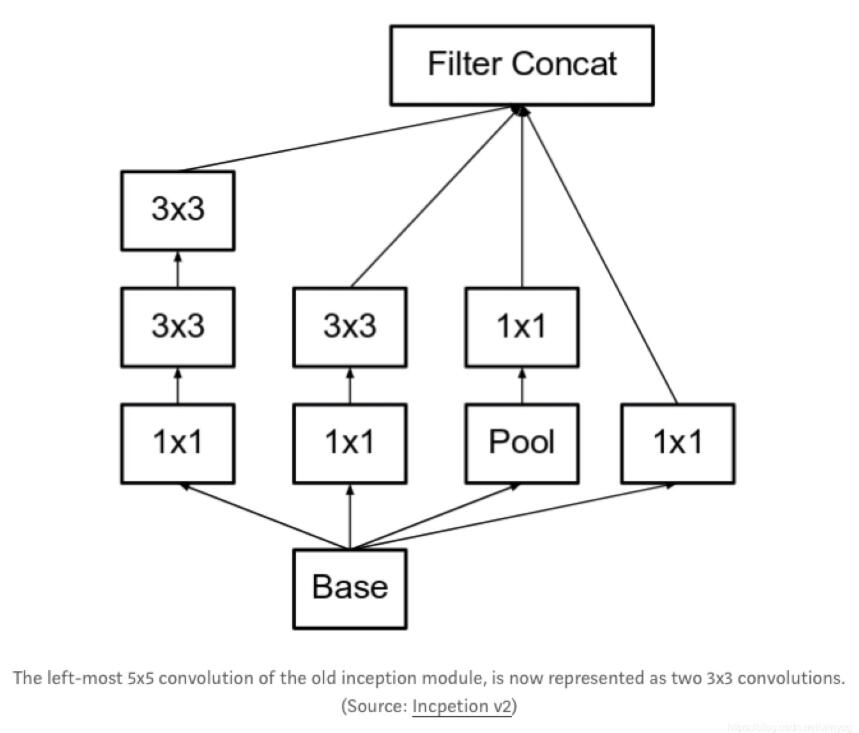
# 编写Inception模块
class Inception(nn.Module):
def __init__(self, in_planes,
n1x1, n3x3red, n3x3, n5x5red, n5x5, pool_planes):
super(Inception, self).__init__()
# 1x1 conv branch
self.b1 = BasicConv2d(in_planes, n1x1, kernel_size=1)
# 1x1 conv -> 3x3 conv branch
self.b2_1x1_a = BasicConv2d(in_planes, n3x3red,
kernel_size=1)
self.b2_3x3_b = BasicConv2d(n3x3red, n3x3,
kernel_size=3, padding=1)
# 1x1 conv -> 3x3 conv -> 3x3 conv branch
self.b3_1x1_a = BasicConv2d(in_planes, n5x5red,
kernel_size=1)
self.b3_3x3_b = BasicConv2d(n5x5red, n5x5,
kernel_size=3, padding=1)
self.b3_3x3_c = BasicConv2d(n5x5, n5x5,
kernel_size=3, padding=1)
# 3x3 pool -> 1x1 conv branch
self.b4_pool = nn.MaxPool2d(3, stride=1, padding=1)
self.b4_1x1 = BasicConv2d(in_planes, pool_planes,
kernel_size=1)
def forward(self, x):
y1 = self.b1(x)
y2 = self.b2_3x3_b(self.b2_1x1_a(x))
y3 = self.b3_3x3_c(self.b3_3x3_b(self.b3_1x1_a(x)))
y4 = self.b4_1x1(self.b4_pool(x))
# y的维度为[batch_size, out_channels, C_out,L_out]
# 合并不同卷积下的特征图
return torch.cat([y1, y2, y3, y4], 1)
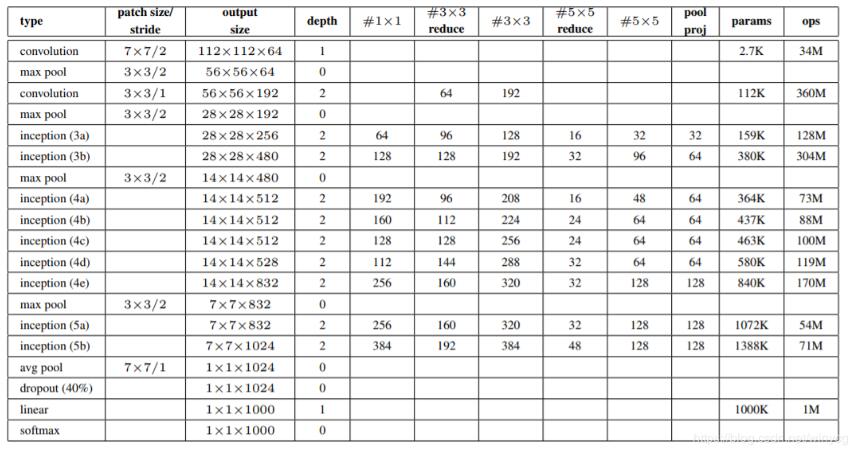
class GoogLeNet(nn.Module):
def __init__(self):
super(GoogLeNet, self).__init__()
self.pre_layers = BasicConv2d(3, 192,
kernel_size=3, padding=1)
self.a3 = Inception(192, 64, 96, 128, 16, 32, 32)
self.b3 = Inception(256, 128, 128, 192, 32, 96, 64)
self.maxpool = nn.MaxPool2d(3, stride=2, padding=1)
self.a4 = Inception(480, 192, 96, 208, 16, 48, 64)
self.b4 = Inception(512, 160, 112, 224, 24, 64, 64)
self.c4 = Inception(512, 128, 128, 256, 24, 64, 64)
self.d4 = Inception(512, 112, 144, 288, 32, 64, 64)
self.e4 = Inception(528, 256, 160, 320, 32, 128, 128)
self.a5 = Inception(832, 256, 160, 320, 32, 128, 128)
self.b5 = Inception(832, 384, 192, 384, 48, 128, 128)
self.avgpool = nn.AvgPool2d(8, stride=1)
self.linear = nn.Linear(1024, 10)
def forward(self, x):
out = self.pre_layers(x)
out = self.a3(out)
out = self.b3(out)
out = self.maxpool(out)
out = self.a4(out)
out = self.b4(out)
out = self.c4(out)
out = self.d4(out)
out = self.e4(out)
out = self.maxpool(out)
out = self.a5(out)
out = self.b5(out)
out = self.avgpool(out)
out = out.view(out.size(0), -1)
out = self.linear(out)
return out
def test():
net = GoogLeNet()
x = torch.randn(1,3,32,32)
y = net(x)
print(y.size())
test()
|